
La navigation des SNLE
La navigation
des Sous-marins Nucléaires Lanceurs d'Engins français (1963-2025)
2 Première génération : le système de navigation du Redoutable
2.1 De la théorie au développement des centrales inertielles de navigation (CIN)
2.3 L'organisation de développement et de réalisation
2.3.1 La participation du LRBA de Vernon
2.3.2 Un atelier spécifique à Brest
2.4 Les installations associées aux centrales inertielles
2.4.1 La visée stellaire périscopique
2.4.2 La radionavigation des années 70
2.4.3 L'horloge de haute précision (VHH)
2.4.4 Le système de transfert d'azimut (STA)
2.5 L'exploitation : Des débuts difficiles pour les exploitants des CINs
3.2 Le développement du Loran C national
3.3 La visée stellaire périscopique revisitée
4 L’évolution du SGN avec l’arrivée du GSE
5 Nouvelle révolution : Le missile M51 avec viseur stellaire
1 Introduction
Le système de navigation des SNLE français, à base de gyroscopes "mécaniques - à toupie" fait partie des équipements critiques qui conditionnaient la réussite du projet cœlacanthe. Ce fut une aventure scientifique, technique et industrielle exaltante et de très haut niveau. Cette aventure s'est terminée avec l'installation de viseur stellaire sur les missiles MSBS (M51) qui a réduit le besoin de précision des informations de navigation pour le tir. Il a alors été possible d'installer un système à gyroscope laser de coût très inférieur dont la précision a atteint le niveau requis..
Le programme de système de navigation pour SNLE français se déroule avec une grande similitude par rapport au programme US (ref.9) : Gyroscopes à roulement à billes, puis à paliers à gaz, puis gyroscope à suspension électrostatique. La centrale CIN (centrale inertielle de navigation comprenant une plateforme de gyros et accéléromètres avec cardans, et une électronique avec console d'exploitation et calculateur numérique) française a intégré dès l'origine un gyroscope moniteur (PGM) contrairement au système US. Le calculateur AE51M (Sagem, utilisé également pour le Concorde) a eu dès l'origine les performances minimales nécessaires.
Les raisons d'évolutions de performance exposées de manière détaillées dans le document US (ref 9) : augmentation de la portée missile, réduction de la fréquence de recalage furent les mêmes pour le programme français.
|
L’encyclopédie des sous-marins français (ref 14), œuvre très importante en 6 volumes, traite assez largement du sujet. Je recommande donc aux passionnés des sous-marins de se procurer cette encyclopédie (il existe des exemplaires d’occasion sur le net), ou, pour ceux qui limiteraient leur intérêt à la navigation, le volume 4 (la navigation n’est toutefois traitée qu’en 4 pages (169 à 172) dans ce volume) et le volume 6.
L’article du volume 4 se conclut par un bilan de 20 années, ce qui nous ramènerait avant l’an 2000. Il évoque néanmoins l’arrivée du gyrolaser sur Le Terrible en 2013, mais le dossier du volume 6 (d’écriture postérieure) est assez complet sur la navigation inertielle. |
Le Redoutable
|

Il n'est pas nécessaire de paraphraser le contenu de l’encyclopédie. Il est important de raconter le contexte de la conception initiale et de rendre hommage à ses auteurs. Il est permis bien entendu, aux acteurs de la DCN qui ont vécu cette aventure, de s’exprimer en contactant le site pour ajouter leurs anecdotes. Certains points renvoient à des articles de la revue « Navigation » de l’Institut Français de Navigation. La revue « Navigation » a interrompu sa parution, les numéros parus sont accessibles sur BNF/gallica (voir bibliographie ci-après pour toutes les références et les renvois à Gallica).
Patrick Boureille à publié en 2008 une thèse (ref.13). "La marine française et le fait nucléaire (1945-1972)". De nombreuses pages sont consacrées à la position de l’amiral US Rickover (p.485 à 489). On n'y trouve cependant pas la position rapportée par l’encyclopédie (vol6- p. 352)(« L’amiral Rickover avait déclaré à l’époque, à la commission de la défense du Sénat à Washington : « La France réussira à réaliser la propulsion nucléaire des sous-marins, mais jamais elle n’atteindra les performances de navigation nécessaires pour une localisation opérationnelle qui rendrait sa force de dissuasion crédible ».
Guy de Bakker et Patrick Boureille ont par ailleurs publié un texte plus réduit qui apporte des informations complémentaires (ref. 15) dans le cadre du parallélisme entre le programme .anglais et le programme français, par rapport à leur relation avec les USA.
Les informations rapportées ici sont celles qui ne sont pas couvertes par le secret technique ou de défense. Par ailleurs, l'apparition des viseurs stellaires pour missiles balistiques a rendu les systèmes inertiels "mécaniques" de très haute précision embarqués sur SNLE obsolètes, compte-tenu de leur coût. Le document US (ref.9), redécouvert récemment, aide à lever le voile sur certains aspects du programme : logique d'évolution du besoin, fonctionnement de la PGM, difficultés d'alignement et de recalage. Il évoque également des aspects industriels : maîtrise de l'emploi du béryllium, approvisionnement de liquide de flottaison de densité précise, ... qui furent évidemment pour Sagem des clés de la réussite.
Le présent texte rapporte la mémoire d'un des acteurs de cette aventure. L'historien qui voudrait bien s’y intéresser pourrait trouver les documents officiels échangés (en particulier entre la direction de projet Cœlacanthe et le STCAN) dans les archives de la DGA à Châtellerault, dans la partie STCAN/section Navigation et Projecteurs de 1960 à 1970.
Malheureusement il n’a pas été possible de retrouver des proches de Jacques Barriac et de François Bailly, pour disposer d’informations complémentaires ou de photos. Pierre Bechet à largement contribué au présent texte.
La réussite du projet n’a été démontrée qu’à l’issue de la première patrouille du Redoutable. Le commandant pour cette patrouille, Bernard Louzeau, qui a suivi la production du sous-marin, a rendu compte avec beaucoup de précision de cette réussite, dans le document de référence 5, sans doute le document clé dans le récit de cette aventure.
J’en suis donc à la rédaction d’une épitaphe pour les centrales inertielles « mécaniques ».
2 Première génération : le système de navigation du Redoutable
2.1 de la théorie à la fabrication des centrales inertielles de navigation
Á l’époque origine du programme Cœlacanthe fut fait un état de l'existant. Il existait bien une centrale inertielle conçue pour les frégates F67. Ses performances n’étaient pas du tout au niveau du besoin.
A la fin des années 1950, les connaissances sur les centrales inertielles de navigation se limitaient à un cours sur la navigation inertielle dispensé à Supaero (A10) et publié en 1962 (ref 1).
Le document a été revu en 1967 et 1991 par J. C. Radix (ref. 2 et 3). S'agissant essentiellement des applications aéronautiques, les aspects liés à la grande précision et à la durée de mission n'étaient pas traités. En 1979, P. Lloret (Sagem) publie dans la revue Navigation N (n°106-4/1979- p.171) (ref.4) un article sur la navigation par inertie, qui reste discret sur la navigation des SNLE
En 1959 une réunion est organisée aux USA, sur le thème de la navigation inertielle des SNLE. Des visites utiles ont lieu mais la position de la marine nucléaire des USA, rappelée au §1 (essentiellement celle de l’amiral Rickover), sera suivie par un embargo des USA sur un transfert de connaissance dans le domaine de l’inertiel.
En 1961, la France envisage encore un achat aux USA
Patrick Boureille rapporte (ref. 13 – p551) que » La centrale inertielle de navigation (passim CIN) doit fournir une position exacte au mille près au bâtiment et aux calculateurs des missiles. Là encore, deux voies sont possibles : la première consiste en une fabrication purement nationale, la seconde en procédant à un achat de matériel auprès des Américains. L’état-major de la marine a lancé l’étude d’un système de navigation dont les premiers essais doivent débuter en 1962. « Si l’on compte une période de deux ou trois ans pour essais et mise au point d’une version opérationnelle, nous pouvons penser avoir un système opérationnel en 1965-1966. »
Jusqu’à 1963 des échanges ont lieu avec les USA. La partie française estime alors qu’elle n’obtiendra rien de plus des USA. Elle considère que les éléments dont dispose Sagem permettront la fabrication des centrales, elle dispose par ailleurs de la possibilité d’approvisionner du liquide de flottaison qui n’est pas dans le périmètre des matériels sous embargo. L’historique des systèmes US et l’état de l’art en 1977 a été rapportée en 1977 (ref.9), il exprime les efforts techniques et industriels réalisés par les USA et, donc, l’effort à réaliser par la partie française.
Au début des années 1960, Sagem disposait d'accords de coopération avec la société américaine Kearfott, ce qui lui avait permis de bénéficier d’importants transferts de connaissance. Mais, brutalement, les États-Unis mettent l'embargo sur toutes les informations susceptibles d'aider la France dans ce domaine.
Par ailleurs Sagem avait développé, avec la société Ferranti, un calculateur AE51 qui fut utilisé pour la centrale inertielle du Concorde. Une version spécifique AE51M en fut dérivée pour piloter la CIN des SNLE.
En 1963, la base théorique sur laquelle proposer une réalisation de centrale inertielle de navigation pour sous-marin de type SNLE était donc entièrement à étudier et à rédiger par la section Navigation du STCAN.
Les américains étaient tout de même soucieux de crédibiliser leur force nucléaire et organisaient des visites dans le cadre des relations bilatérales (ref.14). C’est lors une telle visite que Jacques Barriac a pu se faire une idée des volumes et des contraintes d'installation à bord et de la place à réserver aux équipements du système sur le sous-marin (mission en novembre 1963 rapportée par l'IGM Jacques Barriac (ref.15 p. 140)).
En revanche, dans le même temps, les Britanniques négocièrent l'acquisition de différentes composantes majeures de la force sous-marine nucléaire stratégique avec les USA, dont la navigation par inertie, (cf ref.15 p.148) au prix de leur perte d'indépendance en matière de dissuasion.
Dès 1963, la section Navigation du STCAN dirigée par l'ICGM François Bailly (section de 3 à 4 ingénieurs) travaille sur une architecture dérivée des Centrale de cap et de verticale. Les études menées aboutissent, en tenant compte des performances recherchées à définir les ordres de grandeur des précisions de capteurs recherchées et les dimensions d’une centrale inertielle de navigation (CIN).
|
Il s'agissait de présenter les équations qui régissent une plate-forme 3 axes (axes géographiques locaux) d'un mobile se déplaçant sur terre : - oscillation de schuler et le moyen d'amortir son effet, - oscillation de 24 heures et le moyen d'amortir son effet, - montrer la non divergence à long terme de tous les paramètres sauf la longitude, pour une qualité de gyroscope et d'accéléromètre déterminée, - rechercher la qualité de gyroscope et d'accéléromètre minimale nécessaire pour que les termes non-divergents restent dans une certaine précision, - déterminer pour une qualité de gyroscope et d'accéléromètre la fréquence des recalages nécessaires pour conserver la précision de longitude, - mettre le doigt sur les difficultés de calibration et de recalage (largement évoqué en ref 9 (pages 410 à 414) . |
|
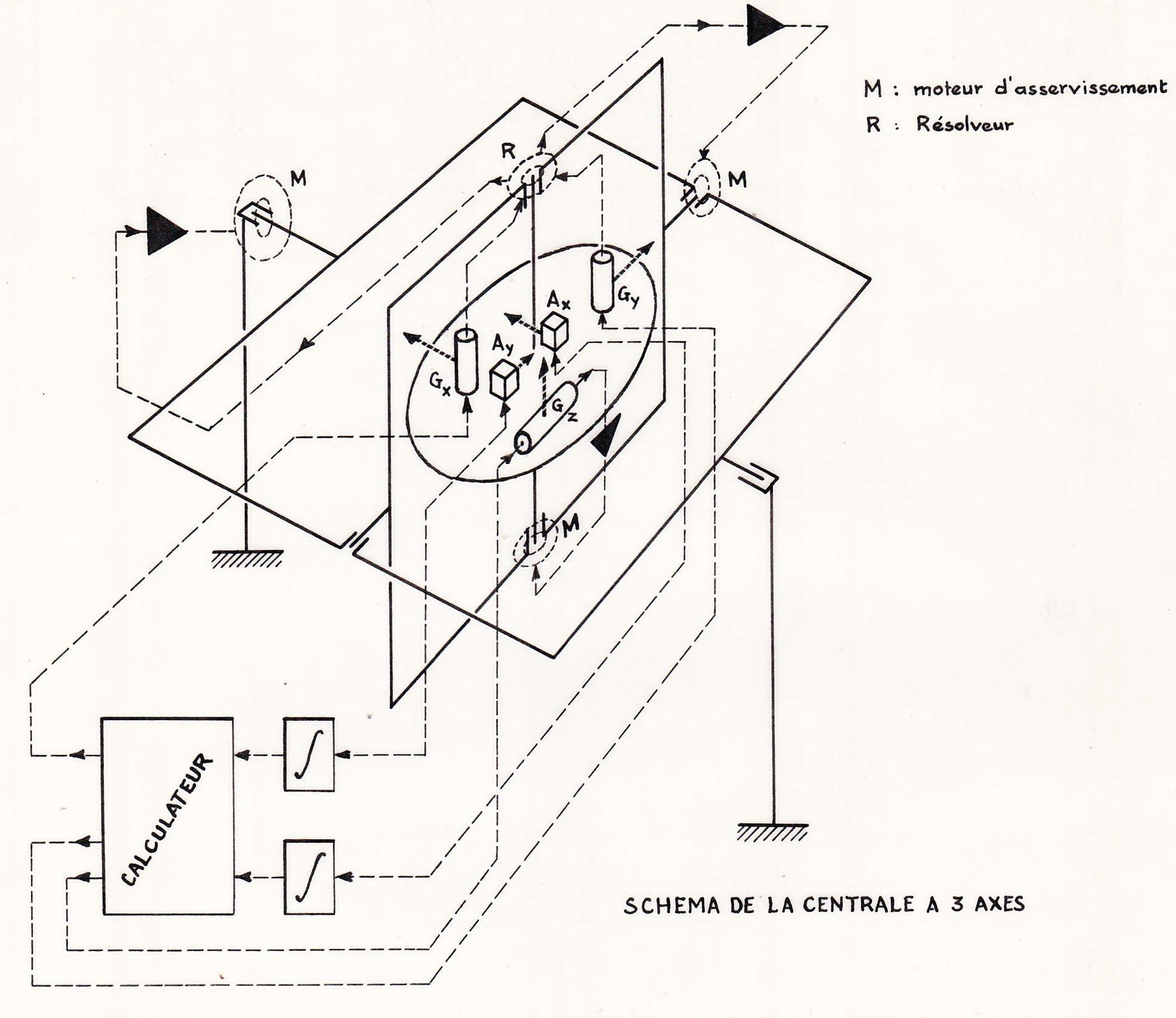
Les travaux théoriques réalisés au STCAN par ailleurs concernaient les modes de fonctionnement, le problème de navigation près du pôle Nord, la préparation de la programmation informatique pour les machines disponibles à l'époque. Sur la base de ces travaux théoriques, la direction du programme Cœlacanthe retint la solution technique proposée et il fut confié à Sagem son développement et sa réalisation. Cette décision fut très importante, compte-tenu du montant financier à engager.
L'étude paramétrique du fonctionnement de la plateforme inertielle à cardans en fonction de la performance des composants inertiels n'est pas publique mais a été reprise par Jacques Barriac dans son exposé sur la Minicin (ref.12). La Minicin reprend le principe de la Cin, avec des performances de gyros inférieures, pour équiper les sous-marins d'attaque et les bâtiments de surface des années 1980, jusqu'à son dépassement coût / performance par les centrales "laser". On retrouve également une partie du document d’étude principal dans le document de B. Cuny : la navigation inertielle des sous-marins (1965) (ref. 3). Ce texte traite de l’amortissement des oscillations de schuler par le loch, des oscillations à la période de 24 heures et de leur traitement.
Un prototype (CIN M1) comportant une seule plateforme fut développé pour le sous-marin Gymnote. Un premier tir de missile eu lieu en décembre 1968. Le système de navigation n’était pas encore parfait mais il était assisté par un mât de champ de tir.
Les réflexions sur la fiabilité et la sûreté de fonctionnement conduisirent ensuite à retenir un ensemble redondant à 3 plateformes CIN et à introduire dès la conception au centre des cardans une plateforme de calibration périodique des gyroscopes (PGM). C’est le système CIN M2B.
Ainsi la petite équipe du STCAN/navigation (le théoricien, Jacques Barriac, le responsable François Bailly et l’ingénieur Pierre Bechet) pilota finalement avec succès la conduite de cette opération et réussit avec Sagem à respecter les engagements de performances et de délais. Il aura tout de même fallu attendre jusqu'à 1971 pour être assuré du résultat satisfaisant.
2.2 Installer une CIN à bord
| L’architecte du sous-marin en développement attendait les informations minimales pour l’installation à bord. Le planning était tendu. Pierre Bechet étudia à Cherbourg, sur la maquette de définition, l’installation à bord de centrale non encore complètement développée. La solution à une tranche avec les 3 plateformes CIN en triangle fut retenue, proche du PCNO ou furent disposées les consoles d’électronique et d’exploitation. Cela ressemble à ce que Barriac a vu aux USA. Le cheminement des faisceaux du STA (système de transfert d’azimut vers les missiles) fut également étudié. | 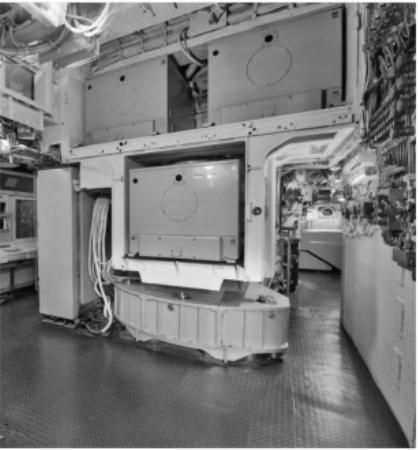 |
Dans le même temps, Sagem dessine le cœur des 4 gyros et accéléromètres, l’enveloppe des cardans (avec les moteurs et inductosyns (capteurs angulaires)). Le démontage des gyros et accéléromètres doit rester possible et l’ensemble dois être climatisé. Lorsque le plan est validé, la section Navigation peut confirmer à l’architecte navire les dispositions d’installation prévues.
Une première centrale est terminée pour installation sur le sous-marin Gymnote. Des tirs de validation ont lieu entre juillet 1968 et mai 1971. Dans la période de la refonte M4 (missile M4 et système de navigation SGN-3c) le Gymnote reprend du service pour les tirs d’essai(1er tir M4 en mars 1982).
2.3 L'organisation de développement et de réalisation
La société SAGEM s’est trouvée en situation de monopole, pour produire ce type d’équipement, même si des équipements de navigation de moindre importance étaient fabriqués sous licence Anschutz (Allemagne) puis après la guerre 39/45 sous licence de la société américaine Kearfott. La société avait également pu embaucher des anciens du centre de recherche allemand de Peenemunde (en particulier Horst Thomsen).
La spécificité du produit a nécessité d’aborder des technologie nouvelles pour Sagem : maîtrise de l’emploi du béryllium, le contrôle des roulements à billes, l’utilisation de liquide de flottaison, y compris le calculateur (AE51M) à la limite du besoin ,…
Le taux des gyros qui atteignaient la bonne performance était assez faible. A l’approche de l’échéance de départ à la mer il fut convenu de demander à CIT-ALCATEL l’étude d’un gyroscope concurrent : le GSE (pour le cas où !). De son coté, Sagem travaillait sur un développement majeur : le gyroscope à pallier à gaz car les difficultés principales du gyroscope produit provenaient du roulement à billes.
Des études de fiabilité furent menées, suivant la méthode américaine. Le matériel fut classé abusivement dans une catégorie à environnement sévère, ce qui donna un résultat inquiétant. Le reclassement en environnement spécifique SNLE donna de bons résultats. Heureusement car le temps de relance après panne d’une CIN était assez long et délicat. Toutefois des dispositions particulières furent prises pour les plongées/remontées et les instants de tir.
De l’équipe du STCAN, l’IDT Pierre Bechet fut « mutée pour emploi »à la société Sagem en 1966 (en réalité il pris sa retraite et eu comme employeur CSEE (dont le patron était Henri HENRIC, prédécesseur de François Bailly au STCAN), pour cause de déontologie. Puis l’IPA Jacques Barriac rejoint Sagem en 1968. La compétence acquise fut donc concentrée dans l’usine Sagem de Colombes.
En 1970, François Bailly dut quitter son poste de chef de section Navigation pour raison de santé.
L’équipe de la section navigation du STCAN à l’origine du projet s’est trouvée dissoute, avant l’entrée en service du Redoutable.
Une nouvelle équipe a été mise en place : l’ICA Jacques Soulé-Susbielles, chef de section, Louis Tuveny responsable du suivi du programme, puis en 1971, François Bihan responsable de la mise au point du logiciel.
Il y avait une difficulté pour contractualiser avec Sagem, compte tenu du risque sur la tenue des délais et des performances. Le contrat principal fut conclu à prix provisoire, accompagné d’une enquête de prix.
2.3.1 La participation du LRBA de VERNON
Une compétence théorique fut constituée au LRBA de Vernon avec un pôle SNLE.
Le LRBA de Vernon qui avait une compétence de longue date, en particulier pour la navigation-guidage des premières fusées françaises contribua largement à la réussite du programme initial destiné au SNLE Redoutable, puis à la refonte M4, puis à l'intégration du GSE. Une équipe spécialisée avait ainsi développé des outils de suivi technique des composants inertiels.
À l’issue de chaque patrouille, Jean Deveaux se rendait à Brest pour recevoir des informations et ramener des documents techniques concernant le comportement des centrales. Après examen, la configuration de composants pour la sortie suivante était diffusée par le LRBA à DCN Brest.
2.3.2 Un atelier spécifique à Brest pour atteindre le très haut niveau de précision
L’arsenal de Brest, avec le support du LRBA et de l’industriel Sagem installa un atelier permettant de contrôler à terre les composants inertiels et de les stocker dans les conditions requises.
.
Hormis la centrale inertielle, la navigation nécessita également des développements de périscope de visée astrale (PVA), de radionavigation et de navalisation d'horloge de haute précision. Ces derniers sont traités ici en l'état actuel de la connaissance des archives. La description technique des centrales inertielles est développée dans l'encyclopédie précitée.
2.4 Les installations associées aux centrales inertielles
Hormis la centrale inertielle, la navigation nécessita également des développements de périscope de visée astrale (PVA), de radionavigation et de navalisation d'horloge de haute précision. Ces derniers sont traités ici en l'état actuel de la connaissance des archives. La description technique des centrales inertielles est développée dans l'encyclopédie précitée.
2.4.1 La visée stellaire périscopique
|
La navigation par observation des astres a toujours existé. Bien qu’indiscrète car nécessitant de positionner un équipement au-dessus de la surface, il fut décidé, faute de mieux, de développer un périscope de visée astrale (PVA). Une équipe de maîtrise d'œuvre et de développement de logiciel fut mise en place. L'histoire de cette équipe est contée par son responsable, Claude Kaiser (voir bibliographie ref. 6).
Le document US de 1978 (ref 9) relate que "la précision de cap du SINS a dépassé celle du périscope de visée astrale type 11 et ce dernier a été débarqué de tous les sous-marins". On peut penser que la décision a également pris en compte l'installation du viseur stellaire sur le missile Trident D4 qui arrive en service en 1979 |
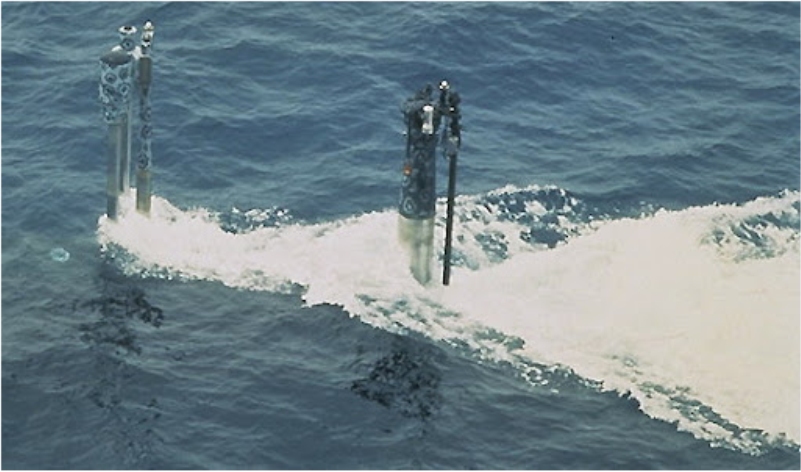
La plongée périscopique |
2.4.2 La radionavigation des années 70
![]()
Les sous-marins en plongée accèdent avec des antennes immergées à faible profondeur aux signaux de fréquences faibles (Omega, Loran). La couverture Omega est mondiale mais sa précision est assez faible. La couverture Loran C est limitée, ce qui justifia le lancement du programme Loran C national entrepris lors de la refonte M4.
2.4.3 L'horloge de haute précision (VHH)
Le système de navigation ainsi que d'autres systèmes du bord (communications, ...) nécessitaient une horloge qui puisse conserver une très haute précision et de la stabilité pendant la durée de la patrouille. Du matériel existait à terre mais il fut nécessaire de le navaliser pour lui faire supporter l'environnement du sous-marin.
2.4.4 Le système de transfert d'azimut (STA)
Compte tenu de la précision angulaire recherchée, il a fallu mesurer l'impact de la déformation du sous-marin lors de ses variations d'immersion et sa rémanence. L'information d'azimut est émise par rapport à un miroir de référence de la CIN pilote choisie. Le missile prend alors en compte cette valeur par rapport à son propre miroir de référence. Au moyen d'un dispositif de rayon lumineux orientable, le STA mesure l'angle entre les miroirs de référence au moyen d'un diasporamètre et envoie cette information au système.
2.5 Des débuts difficiles pour les exploitants des centrales inertielles
L’encyclopédie (vol. 4, p.170) mentionne des difficultés d’exploitation. Si, à l’issue de son commandement, le premier commandant du Redoutable (CF Louzeau) exprima la réussite de sa mission, il insista cependant sur les progrès nécessaires pour assurer la sérénité de l'exploitation du système (choix de la centrale pilote, décision de remonter près de la surface pour effectuer un recalage (périscopique ou radioélectrique) (revue Navigation - Janv. 1973- ref 5). En effet, les capacités informatiques - et le calcul en virgule fixe en particulier - furent un point faible important. Les calculs sur les lignes trigonométriques lorsque le sous-marin montait en latitude atteignaient leurs limites. Il fut toutefois heureusement possible de résoudre cette difficulté car la portée du missile M1 et la situation de guerre froide orientaient plutôt les patrouilles de SNLE vers la Norvège.
Une épigraphe de Pierre Bechet figurait en tête de la notice de la CIN : « Il n’est que de s’y rendre pour le perdre ». Cette épigraphe exprimait la difficulté technique particulière de la navigation inertielle proche du pôle.
3 La refonte M4
3.1 Le SGN version SGN-3C
|
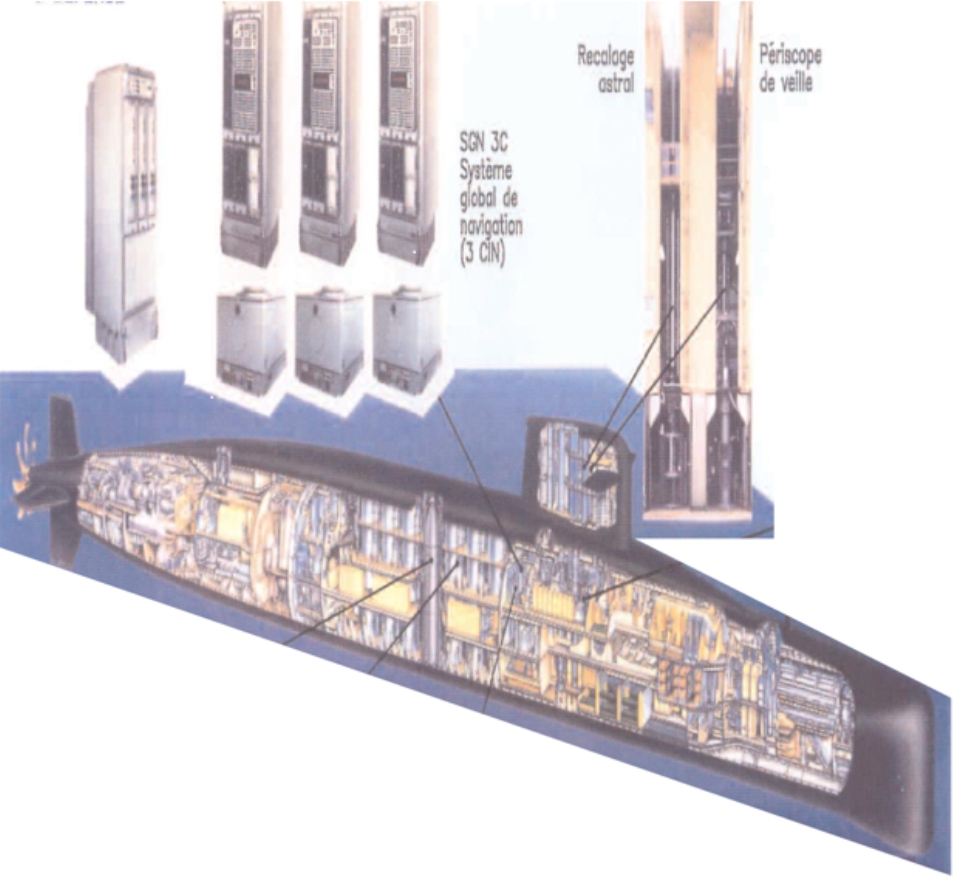
La loi de Moore sur les vitesses de calcul était déjà là, implacable. Par ailleurs, les constantes de temps des phénomènes physiques observés n'évoluent pas. Le potentiel de calcul nécessaire était là pour développer du logiciel d'optimisation. La version SGN-3C de la refonte M4 (L'Inflexible) du Système Global de Navigation (SGN) fut équipé d'un calculateur 15M125 (F) et le programme supporta le développement d'un opérateur virgule flottante hardware pour plus de sûreté de réussite. La société CII livra le matériel et développa les connexions aux plateformes inertielles en collaboration avec Sagem. Le logiciel fut développé par le LRBA Vernon, (programmation de Maxime Lelièvre, sous la direction de Jean Deveaux) en collaboration avec la société Sagem.
|
L’installation du système de navigation à bord |
En 1979, Pierre Faurre rapporta de Stanford, où il étudia avec le professeur Kalman, les théories sur le filtrage optimal. Il entre à la société Sagem puis en devient le président en 1986 (ref. 10 et 11).
Le SGN est un terrain privilégié pour utiliser le filtrage optimal. La modélisation statistique des grandeurs en évolution est déjà avancée et il est possible d’utiliser les redondances existantes dans le système. Cet axe de développement répondait parfaitement à la demande des opérationnels. Le travail était suivi de près par Pierre Faurre. Le travail du LRBA fut salué par l'attribution à l'IPA Jean Deveaux d'un prix de l'académie des sciences (Prix 6949 le 11 décembre 1978) pour l'étude et la réalisation d'un système global de Navigation. La classification confidentielle du sujet ne permet toutefois d'accéder au contenu présenté. Le document US (ref 9) insiste sur l’intérêt du filtrage optimal et rappelle que ce fut une des premières utilisations d'ampleur.
3.2 Le développement du Loran C national
Le caractère local du système amena les pays à créer des chaînes régionales de radionavigation. La France s'est ainsi dotée d'un système national de radionavigation LORAN C. Le système est présenté par Bernard Canu dans la revue Navigation n°126 et n°127- (bibliographie ref. 7).
3.3 La visée stellaire périscopique revisitée
A l'occasion de la refonte du missile M4, les progrès possibles sur le matériel et le logiciel ont conduit à concevoir un nouvel équipement baptisé MRA2 (Moyen de Recalage Astral). Cet équipement est évoqué dans le document de Claude Kaiser déjà cité.
L’évolution marquante du PVA (Périscope de Visée Astrale) comme moyen de recalage des Centrales Inertielles de Navigation (CIN) est la suppression de l’opérateur humain dans la boucle de pointage des étoiles, ce qui conduit à développer un nouvel équipement, appelé Moyen de Recalage Astral (MRA), entièrement automatisé, réalisé complètement par la SAGEM qui, entre temps, avait acquis les activités optiques de la SOPELEM. Ce MRA intégré dans le Système Global de Navigation détermine la meilleure estimation de navigation par filtrage de Kalman des informations élaborées par la CIN, la radionavigation, le loch.
4 L’évolution du SGN avec l’arrivée du GSE - le SGN-3D
L’Encyclopédie présente (V6 – p.338) l’historique et les caractéristiques du GSE (gyroscope à suspension électrostatique).
Le document de ref.9 (1977) exprime la complexité introduite par la précision recherchée (vecteur d’état du système à plus de 80 paramètres). Il rapporte en détail l'arrivée et l'intégration du GSE dans le système SINS US. Après une première version avec une bille de 4,1 cm de diamètre, la version définitive se construit autour d'une bille pleine de 1 cm de diamètre.
La conception technique du GSE français fût présentée dans la revue « Navigation » n°126 4/1984 (P. Leger et F. Bihan – ref. 8). Elle se différencie principalement par une bille creuse de 3,8 cm de diamètre, plus prometteuse qu'une bille pleine. L’encyclopédie évoque une performance (quelques 10-6 degré/heure) au-delà de l’objectif fixé. Cet équipement a donc atteint les performances souhaitées et permit une fréquence de recalage plus faible, avec il est vrai, un coût élevé.Le SGN-3D se caractérise par 2 CIN type SGN-3C et 1 GSE.
La présentation US indique que le GSE a atteint ses performances en développement en 1977 et démarre en fabrication de série. Elle indique par ailleurs (page 413), que, compte-tenu des performances du système le périscope de visée astrale est débarqué, ce qui peut apparaître comme hâtif : L'arrivée du viseur stellaire sur le missile est sans doute à considérer également.
5 Nouvelle révolution : Le missile M51 avec viseur stellaire
Les missiles balistiques n'ont cessé d'évoluer pour maintenir leur crédibilité au niveau mondial. Les portées se sont accrues (classifiée pour la France). Pour assurer la précision de tir ils bénéficient du recalage stellaire en vol.
La réalisation d'un viseur stellaire est la conjonction de l'évolution des capteurs optiques (vision des étoiles de jour), miniaturisation, de la puissance de calcul disponible et de la mise au point d'algorithme permettant de reconnaitre une configuration d'étoile dans une visée. Cet équipement qui résulte de la technologie duale est donc arrivé à point nommé.
Le missile français (M51) a pu être équipé d'un viseur stellaire.
Cette évolution a modifié le besoin en précision de données de navigation sur les SNLE. Parallèlement, les centrales de navigation à gyroscopes Laser progressèrent, permettant le remplacement des SGN/GSE à moindre coût.
6 Conclusion
Cet épisode méconnu de réussite du génie français s’est caractérisé par :
- La foi et la ténacité des ingénieurs pour réussir à la limite de l’impossible,
- Une association d’une organisation étatique et d’un industriel qui a su dépasser les obstacles habituels qui peuvent arrêter un tel projet.
IGA (2s) François Bihan
7 Bibliographie
-
J. Carpentier, J.-C. Radix, J. Bouvet, and G. Bonnevalle - Navigation Par Inertie (Inertial Navigation) - Dunod Paris 1962.
-
Radix (JC) La Navigation par inertie / par Jean-Claude Radix - Presses Universitaires de France. Paris - 1967
-
Cuny (B.) La navigation inertielle des sous-marins (1965) https://www.aadcns.fr/global/gene/link.php?doc_id=4136&fg=1
- Lloret P. – Navigation par inertie - https://gallica.bnf.fr/ark:/12148/bd6t53412929.item
-
Bernard Louzeau – La navigation des sous-marins nucléaires lanceur d’engins - revue Navigation n°81 - 73/1
https://gallica.bnf.fr/ark:/12148/bd6t53401331/f78.item -
Claude Kaiser - Le centre de calcul Cœlacanthe 1963-1970
https://www.aadcns.fr/global/gene/link.php?doc_id=3765&edit_lang=fr -
Bernard Canu - Revue Navigation n°126 et 127 -
n°126 : https://gallica.bnf.fr/ark:/12148/bd6t53442322/f16.item
n°127 : https://gallica.bnf.fr/ark:/12148/bd6t53401242/f15.item
-
P. Leger et F. Bihan – le GSE – Revue Navigation n°126 (1984) https://gallica.bnf.fr/ark:/12148/bd6t53442322/f72.item
-
B. McKelvie et H. Galt, Jr. - Evolution du système de navigation pour les sous-marins lanceurs d’engins balistiques de la flotte américaine (SSBM)
revue Navigation n°104 - 78/4 - https://gallica.bnf.fr/ark:/12148/bd6t5340128k/f41.item -
Pierre Faurre – Système de navigation à inertie hybride optimisé – Navigation- n°70 - https://gallica.bnf.fr/ark:/12148/bd6t5340009z/f31.item
-
Pierre Faurre et al. — Navigation inertielle hybride optimale, Dunod (1970)
12. Jacques Barriac - un système marin de navigationà inertie à gyroos accordés : la MINICIN de Sagem - Navigation'7/1982 https://gallica.bnf.fr/ark:/12148/bd6t53423171/f11.item
13. Thèse de doctorat de Patrick Boureille publiée en 2008 – La marine française et le fait nucléaire (1945-1972)
(Document accessible à la bibliothèque de l’école militaire)
14. L'encyclopédie des sous-marins français (6 volumes) : de Thierry d'Arbonneau
15. Guy de Bakker, Patrick Boureille. Les dissuasions atomiques navales françaises et Britanniques entre 1945 et 1972 : une relation à l’ombre des Etats-Unis. Revue d’histoire maritime, 2013, 16 ; pp.119-149. 10.70551/CRLR1687 . hal-04903689 https://hal.sorbonne-universite.fr/hal-04903689v1/file/RHM%2016%20979-10-231-1853-7%20de%20Baker-Boureille.pdf
8 Liste des acronymes
|
Sigle |
Définition |
|
CESAD |
Composante Embarquée du Système d’Armes de Dissuasion |
|
CII |
Compagnie Internationale pour l'Informatique |
|
CIN |
Centrale Inertielle de Navigation |
|
DCN |
Direction des Constructions Navales (Intégrée dans la structure DGA pour sa partie étatique, et devenue Naval Group pour sa partie industrielle) |
|
GPS |
Global Positioning System |
|
GSE |
Gyroscope à Suspension Electrostatique |
|
IGM |
Ingénieur du Génie Maritime - appellation devenue Ingénieur de l'Armement (Branche Mer) |
|
LORAN C |
LOng RAnge Navigation (Dispositif de positionnement radioélectrique) |
|
LRBA |
Laboratoire de Recherches Balistiques et Aérodynamiques |
|
MRA |
Moyen de Recalage Astral |
|
MSBS |
Missile Mer Sol Balistique Stratégique |
|
PVA |
Périscope de Visée Astrale |
|
SGN |
Système Global de Navigation |
|
SINS |
Appellation du système de navigation dans les textes US |
|
SNLE |
Sous-Marin Nucléaire Lanceur d'Engins |
|
STA |
Système de Transfert d'Azimut |
|
STCAN |
Service Technique des Constructions et Armes Navales |
|
VHH |
Horloge de Haute précision |
arial 12
